
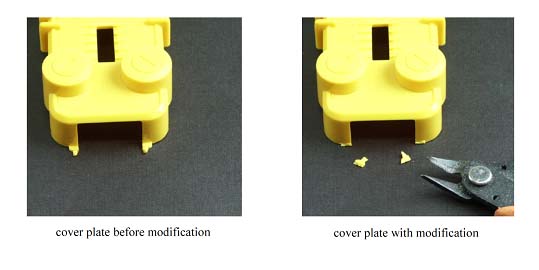
Before the RAI-Pro can be attached to the OWI-535, a slight modification must be made to the robotic arm. Remove the yellow cover plate from the robotic arm and clip the feet that help secure it to the robotic base, see images below. This will allow enough lift of the plate for the RAI-Pro to be inserted into the base port of the robotic arm. Reattach cover plate with screw and reinsert wires into headers.
Connect the interface to the base of the robotic arm using the female header, making sure the header is properly seated in the base platform of the robotic arm. While the interface draws power from the robotic arm power supply when it is turned on, The PIC microcontroller draws its power from the USB connection.

Using the Robotic Arm Interface:
Initially the power to the interface should be turned off. Start the Serial Interface program, then turn on the interface.
Clicking on any function button will initiate the robotic arm to perform that function. Clicking on the same function button a second time will stop that function. In addition instead of clicking on the same function button a second time to stop a function you may also click on a second function button, this will stop the first function from performing as before, and initiate the robotic arm to perform the second function immediately.
