

Sphere-Bot™ is an egg marking and decorating robot, just in time for Easter. Sphere-Bot™ uses two standard HS-322 HiTec servomotors. The brains for Sphere-Bot™ is the USB-SMC-04 Servomotor controller. However, if you have a programmable servomotor controller that can control two HiTec hobby servomotors simultaneously, it probably can be used for the brains of Sphere-Bot™. Graphic designs and/or text is programmed into Sphere-Bot™ using the GUI interface of the SMC-04 USB controller.
The inspiration for Sphere-Bot™ began with a visit to Bruce Shapiro’s motion control website http://www.taomc.com/home.htm. If you have a chance visit this site to see his mind numbing motion control bots.
Sphere-Bot™ may be purchased as a kit or built from scratch. The key components for Sphere-Bot™ may be purchased separately. In this article we will assume you are building Sphere-Bot™ from scratch and the instructions are based on that premise. The kit version of Sphere-Bot™ is shown at the end of this article.
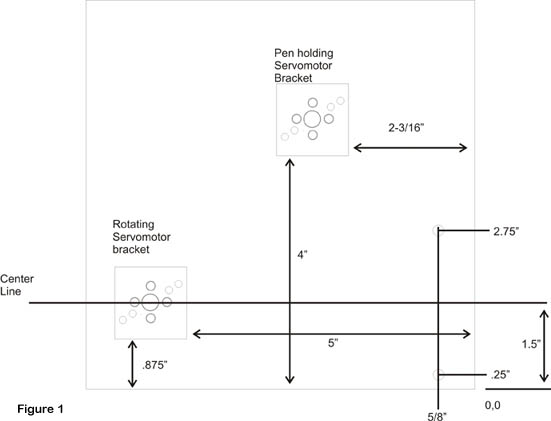
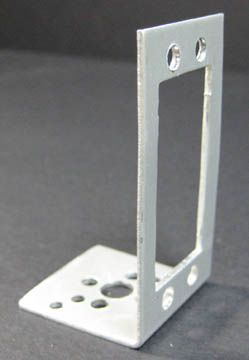
Sphere-Bot™ is built on a square 6.75” x 6.75” ¾” thick wood platform. Component placement locations are shown in figure 1. Servomotor brackets, see figure 2, make positioning and placing the servomotors on the platform easy. Placement dimension for the brackets are taken from one corner of the platform, so if you have a larger base, you can still locate the positions accurately. Corner 0,0 is the lower right hand corner of figure 1.
Transfer the measurements and locations from figure 1 onto your wood platform.