The inspiration for this robot originally came from Richard Weait of North York, Toronto. He create a light seeking robot in a transparent globe (ball). More recently Dave Hrynkiw from Calgary Canada, picked up the ball, so to speak, and developed a series of light seeking mobile solar ball robots.
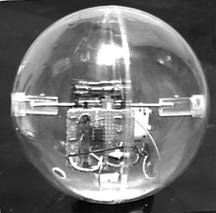
There are two functions to this mobile robot that are interesting. First is the method of locomotion. Inside the globe is a gear box. Each end of the gear boxes shaft are secured and locked to opposite sides on the inner surface of the transparent globe. The shafts are locked to the inside of the sphere so that they can not rotate, forcing the gear box itself to rotate. When at rest, the weight of the gear box keeps it at bottom dead center ( the gear box facing down) and the ball resists rolling. When the gear box is activated, the gear box begins to rotate inside the globe. (the gear box is forced to rotate, because the shafts are locked to the inside of the sphere). This moves the center of gravity of the ball forward, causing the ball to roll forward.
The second function relates to the power supply for the gear box. The original solar robots has an on-board power supply that provided intermittent power to the gear box. The on-board power supply consists of a solar cell, main capacitor and a slow oscillating or trigger circuit. When exposed to sunlight, the solar cell begins charging the circuit's main capacitor. When the capacitor reaches a certain voltage a trigger circuit dumps the store electricity through a high efficiency motor connected to the gear box causing the robot to move forward a little.
The solar ball robot described here uses a similar gear box assembly, but for power uses two standard AA batteries. The disadvantage to batteries is that they must be replaced when worn out. The advantage however is that they supply continuous power to the robot allowing one to easily study its behavior, locomotion and mobility.
With the original solar ball robot one needs to use time elapse photography to study these effects. The charging of the capacitor takes a few minutes, depending upon the intensity of sunlight. When the electricity is discharge into the motor the robot lurches forward a short distance. For example, 10 hours of motion with the original solar ball can be compressed into a few minutes of study with this robot.
While this particular robot doesn't incorporate the electronics for an on board power supply, it still uses a light trigger. The circuit shown in figure 1 controls the power from the batteries to the gear box motor. The circuit reads the level of illumination that the robot sees. If the light level is high enough it turns on the motor to the gear box. The trip level of the circuit is user adjustable using potentiometer V1.